Integrate
automated solutions to detect diseases appearing over crop canopies to monitor health of the plants and potentially reduce the usage of chemical PPPs the plants and potentially reduce the usage of chemical PPPs.
Reduce
the amount of time and effort for farmers in crop inspection and management.
Locate
weeds and other diseases in the field through image analytics.
Crop monitoring
The overall scope of UC1 is to create a set of transversal solutions to manage, monitor, and interact within vineyards with the objective of detecting diseases and monitoring canopy health. UAVs and ground sensors will be implemented to identify causes and provide treatments at individual plant levels, minimising the effort to keep crops in good health and hence, maximise crop production and revenues. In order to accomplish these objectives, the solutions will be based on the adoption of UAV for image analytics processing, and sharing the data with a crop management dashboard to monitor and assess field data and operational field strategies.


Technical Requirements
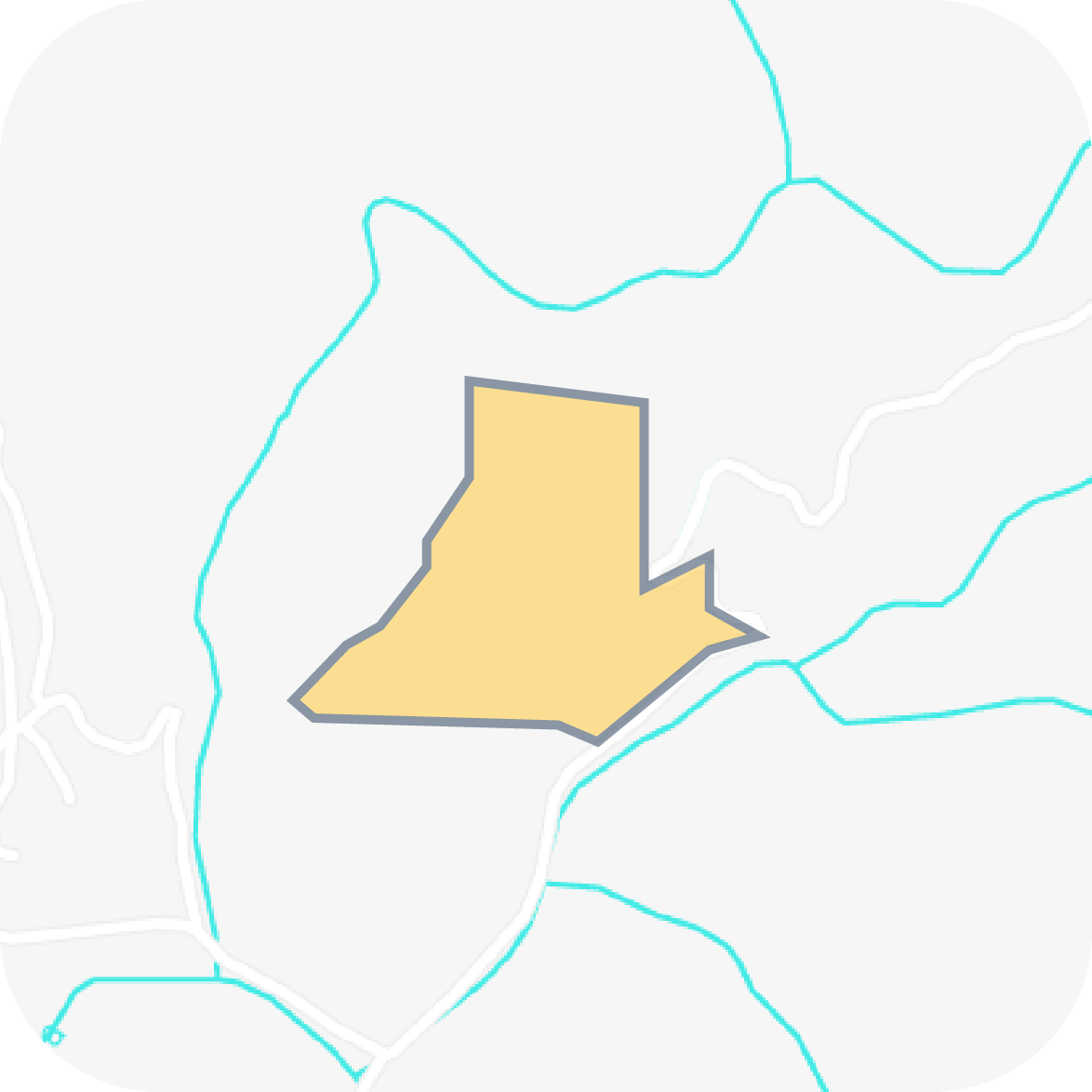
Pilot area
Area: Terragona, Spain
(41.17499860498387, 0.7919285042980028)
120 hectares of viticulture production for varied species
- DJI Mavic 3M
- Multispectral camera
- RGB Camera
- Stabilizer
- Detection System
- Video Streaming
Methodology
A. Data system architecture
For the architecture of the data system, a suitable network will be developed in order to share theretrieved images (not in real-time) from the deployed drone to the processing hardware. After the imageprocessing with ML algorithms, the output data will be uploaded to a cloud service.
B. Data Storage
For the data storage, the MongoDB database (NoSQL structure) will be used, while all the availabledata will be converted to a standard text-based format, such as JSON, for hardware communication.
C. Data acquisition (drone technology)
Aerial data acquisition will be performed with the deployment of UAVs (for instance, with similarcharacteristics as the DJI Mavic 3 enterprise) with RGB,thermal and multispectral cameras, providing the corresponding images of the crop.
D. Orthomosaic reconstruction
The orthomosaic reconstruction of the collected images will be based to a Scale Invariant FeatureTransform algorithm, which transforms the image content (features) into local coordinates.
E. Custom training
The custom training will involve the creation of manual labels and masks for each image of the crop’ssegmentation, usage of emerging tools for labelling, etc., in order to provide sufficient skills for objectdetection and crop monitoring.
F. Object Detection
The orthomosaic reconstruction results will be exploited for the identification of the grapevines in thestudy area. The segmentation of the farm will be performed using a deep learning architecture, such asMask-RCNN or U-Net.G. Individual plants catalogueIn order to create an individual plant catalogue, each crop will be associated with a suitable healthstatus. The health of the plants will be estimated from the processing of aerial and ground data (RGB,thermal and multispectral images) with the developed ML algorithms.